Robótica industrial: IA y visión artificial.
Robótica Industrial. En los últimos años se habla mucho de la industria 4.0 como la nueva revolución que da paso de lo físico a lo digital, que conecta todos los dispositivos de la cadena de producción gracias al IoT o internet de las cosas, que permite monitorizar todos los procesos industriales en tiempo real y que gracias a las nuevas tecnologías en inteligencia artificial brinda de un análisis más preciso, predictivo y eficiente de los datos. Además, da la posibilidad de automatizar ciertos procesos capacitando de inteligencia a las maquinas capaces de solventar muchas tareas con rapidez y mejores resultados que el que podemos obtener nosotros como humanos.
Es probable que esta revolución no afecte solamente a la cadena de producción y la manera en que se trabaja en la industria, sino que revolucionara directamente a la sociedad y como las empresas interactúan con sus clientes, así como el cambio en los roles de los empleados que precisaran de un mayor conocimiento técnico para el mantenimiento de los sistemas y dispositivos dentro de la cadena de valor en un cada más exigente sector industrial y la robótica industrial.
Robótica industrial
Hoy en día no es nada raro al entrar en una planta de producción encontrar multitud de aplicaciones de robótica industrial, brazos robóticos realizando tareas repetitivas que permiten incrementar la producción automatizando ciertos procesos de paletizado o des paletizado, montaje, soldadura, manipulación, movimientos de cargas, pintado, embalaje, inspección y controles de calidad, entre muchos otros. Los robots industriales llevan más de 40 años en el sector industrial y desde que empezaron a introducirse como una herramienta fundamental en los procesos de automatización de la industria, la evolución tanto del hardware como del software ha sido exponencial, así como los casos de uso. A parte del conocidísimo y extendido brazo robótico industrial, es muy habitual poder encontrar otros robots que forman parte de la rutina de muchísimas fábricas en los diferentes sectores de la industria. Actualmente podríamos destacar:
- Brazo robótico industrial: En robótica Industrial, es un brazo mecánico programable, capaz de realizar tareas repetitivas sin descanso en sustitución del operario humano. Pueden llegar a mover pequeños o grandes pesos dependiendo del modelo de robot a una alta cadencia, aumentando los procesos de producción y reduciendo los costes de estos. Un punto importante es el factor de seguridad, que gracias a una estricta normativa asegura e intenta evitar accidentes. Podríamos destacar los robots de 6 ejes como uno de los más extendidos, aunque hay muchas otras opciones dependiendo el caso de uso o los requerimientos de la aplicación como los robots araña, los scara o los cartesianos.
- Cobots: En robótica industrial, los robots colaborativos tienen un objetivo similar al de los brazos robóticos con la principal diferencia que están diseñados para poder trabajar con personas. Habitualmente mueven cargas menos pesadas y a menor velocidad y disponen de sensores de fuerza o intensidad en sus ejes permitiendo el paro de emergencia automático en caso de obstrucción o choque. Esto permite colocar los cobot dentro del proceso productivo sin barreras y en colaboración con los operarios. Suelen ser fácilmente programables de manera que no requieren de operarios con un alto nivel técnico para poder manipularlos.
- AGV: Los vehículos guiados automatizados son un tipo de
robot que se mueven dentro de un espacio sin necesidad de un conductor. Son muy
habituales en logística para el transporte de cargas o productos, aunque se han
extendido en otros sectores industriales para cargar y descargar de forma
autónoma a los servicios de transporte, trasladar bultos o transportar cargas
entre diferentes puntos de la fábrica. Podemos encontrar diferentes opciones o
tecnologías que usan filoguiado, visión artificial, laser, entre otros para
poder reconocer el entorno y poderse mover con seguridad y eficiencia por él.
- Drones: Similar a los agv, los drones son vehículos aéreos
no tripulados. Actualmente no están tan extendidos en la industria como los
casos anteriores y son habitualmente controlados de forma remota, aunque los
drones autónomos se encuentran en una fase de desarrollo muy avanzada. Son muy
útiles para inspección de áreas de gran extensión o difícil acceso y por este
motivo suelen incorporar cámaras de visión para realizar controles de calidad
de estructuras o líneas de alta tensión, mapas topográficos, control de plagas
en agricultura, entre otros casos de uso.
Inteligencia artificial en la robótica
industrial
A pesar de lo rápido que está
evolucionando el campo de la inteligencia artificial y los grandes avances que
se han conseguido en os últimos años, hay una paradoja generalizada sobre como
muchas tareas que para los humanos son innatas son muy difíciles o prácticamente
imposibles de solventar mediante modelos de inteligencia artificial, por
ejemplo tener emociones o simplemente vaciar un lavavajillas, mientras que
otras tareas que para nosotros son muy difíciles de realizar, la inteligencia
artificial es capaz de solventar sin que sepamos con exactitud como ha llegado
a dar un resultado en concreto, como por ejemplo predecir el sexo de una
persona simplemente analizando la retina de una foto del fondo de su ojo, algo
que aun la comunidad de expertos en oftalmología no saben muy bien cómo hacer.
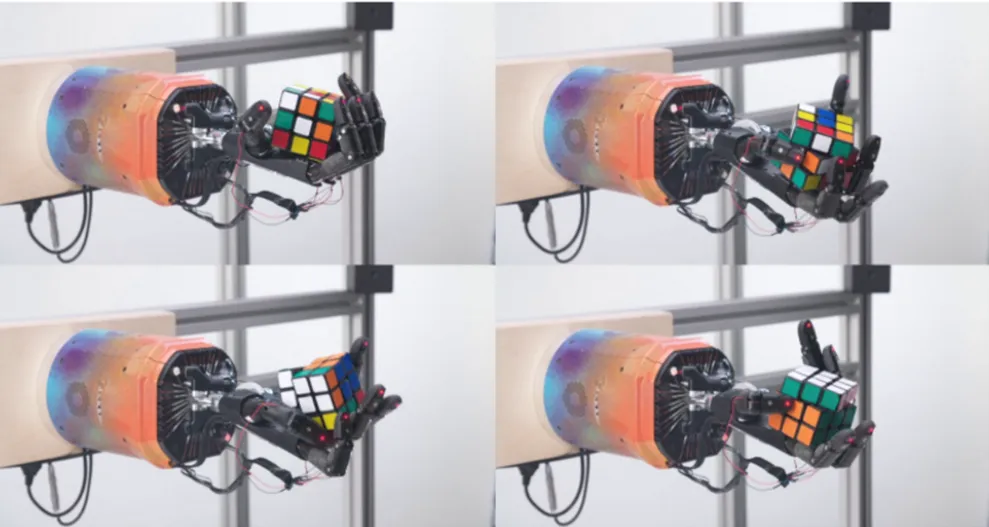
Algunos estudios sugieren
que las funciones de las manos y los dedos que realizamos sin pensar, en
realidad se realizan en función de la enorme cantidad de información almacenada
en el cerebro. Por lo tanto, estudiar el desarrollo en la robótica de dichas
funciones es un problema difícil de solventar que se relaciona directamente con
el estudio de la inteligencia humana.
Una estrategia para robotizar los procesos de fabricación es adquirir un comportamiento de trabajo humano, donde actualmente se están estudiando modelos de Reinforcement Learning para enseñar a los robots a imitar y aprender a base de prueba y error.
Así que, podríamos decir que el siguiente paso dentro de la industria 4.0 es el de poder dar más autonomía a la robótica industrial, a los robots industriales y esto pasa por el estudio y aplicación de las nuevas tecnologías en inteligencia artificial. Como resultado se espera conseguir maquinas más autónomas capaces de tomar decisiones en tiempo real y dentro del entorno de producción en colaboración con otras máquinas y con los operarios.
Hay muchos factores donde
la comunidad científica, las grandes empresas y los desarrolladores están
dedicando todos sus esfuerzos y que influirán directamente en la adaptación de
los robots autónomos a la industria como son los avances en el campo del
machine Learning, Deep Learning, la computación paralela o de alto rendimiento
o el 5G entre otros. Para poder conseguir esta autonomía, no es solo trabajar
en los dispositivos, también es necesario crear un entorno donde gracias al IoT
las maquinas puedan acceder a información que les permita realizar sus
funcionalidades, recibir órdenes de trabajo, realizar mantenimientos
predictivos y poder optimizar en general los procesos de la producción.
Visión artificial aplicada a la robótica
industrial
Dentro de la robótica
industrial, uno de los aspectos a tener en cuenta en la búsqueda de la
autonomía de los robots, es la comprensión del entorno que les rodea y en este
punto la visión artificial desempeña un papel muy importante. A grandes rasgos la visión artificial se
refiere a dar la capacidad a las máquinas de ver, analizar y comprender, de forma
que sean capaces de localizar objetos, identificarlos, diferenciarlos, entre
otros, para tomar decisiones en base a las características extraídas.
Dentro del campo del Deep
Learning, la visión artificial es uno de los aspectos donde más se ha
evolucionado en la última década gracias a la aparición de las redes neuronales
convolucionales capaces de capturar, aprender y extraer características
globales y locales del contenido de una imagen o incluso a la codificación de
estas características mediante los cada vez más extendidos transformes
heredados del NLP o procesado del lenguaje natural y todos los estudios y
proyectos posteriores hacia nuevas arquitecturas y modelos capaces de solventar
tareas de clasificación, localización de objetos en 2D y 3D, segmentación semántica,
instanciada o panóptica, generación de datos sintéticos, transferencia de
estilos, generación de imágenes a partir de texto, entre muchos otros.
A pesar de estos avances, si echamos la vista
atrás incluso antes de la explosión del Deep Learning, la visión artificial
industrial aplicada a la robótica lleva muchos años instaurada dentro de los
procesos de automatización industrial. Alguno de los casos de uso es:
- Pick and
place: Mediante una cámara 2d, se
localiza un objeto entrenado normalmente con un algoritmo de patrones
geométricos, devolviendo la coordenada al robot en base a una calibración
previa robot-cámara. El robot coge el objeto y lo ubica en otra posición que
puede ser alimentación de máquina, packaging, montaje, entre otros.
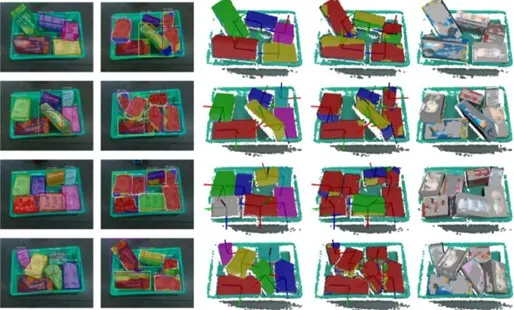
- Bin
picking: Es una evolución del
pick and place, pero trabajando con datos 3D. Las piezas vienen dentro del
contenedor de cualquier manera y es habitual cargar el cad de la pieza en el
software para la localización 3d de esta dentro de la escena, de forma que
podamos devolver la pose (x, y, z, rx, ry, rz) de la pieza en base robot para
que el robot pueda ir a recogerla.
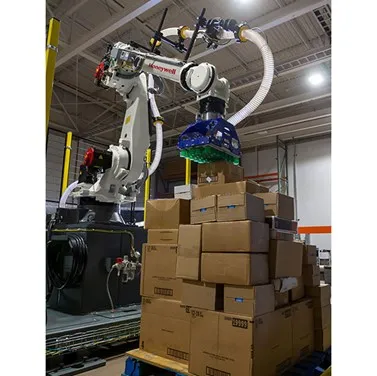
- Despaletizado: Habitualmente son estructurados y se trabaja por
pisos. Se puede utilizar una cámara 2D, 3D o RGBD para localizar la pieza y
devolver la pose al robot.
- Paletizado: En muchas ocasiones como el robot va paletizando
no requiere de visión porque sigue un algoritmo de ordenación, aunque se pueden
utilizar cámaras para localizar los espacios libres de un pallet e ir
paletizando de una forma autónoma según necesidades. Esto es útil cuando los
tamaños de los objetos, muchas veces cajas, son diferentes y vienen de forma aleatoria.
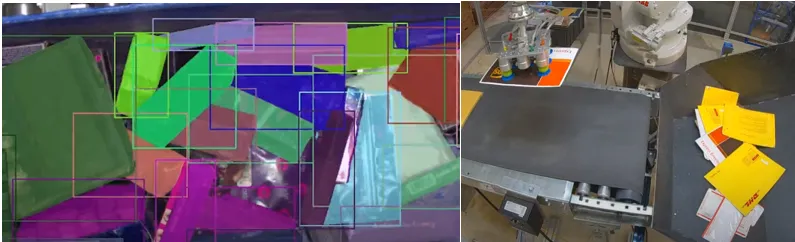
- Pick
objectos de formas irregulares:
Este tipo de picking está pensado para poder localizar y coger objetos de
diferentes formas y tamaños en la misma caja o cinta transportadora. Utiliza
algoritmos de Deep Learning de segmentación y detección de objetos para poder
encontrar el centro de masas de estos habitualmente en la imagen 2D que tiene
una correlación directa con una imagen 3D, de manera que encontrado el centro
de masas se puede dar la pose de esta en base robot.
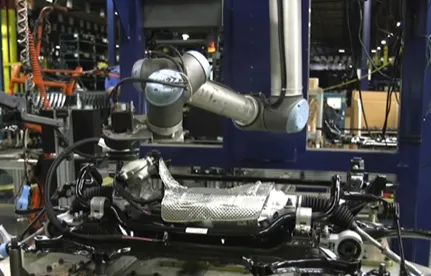
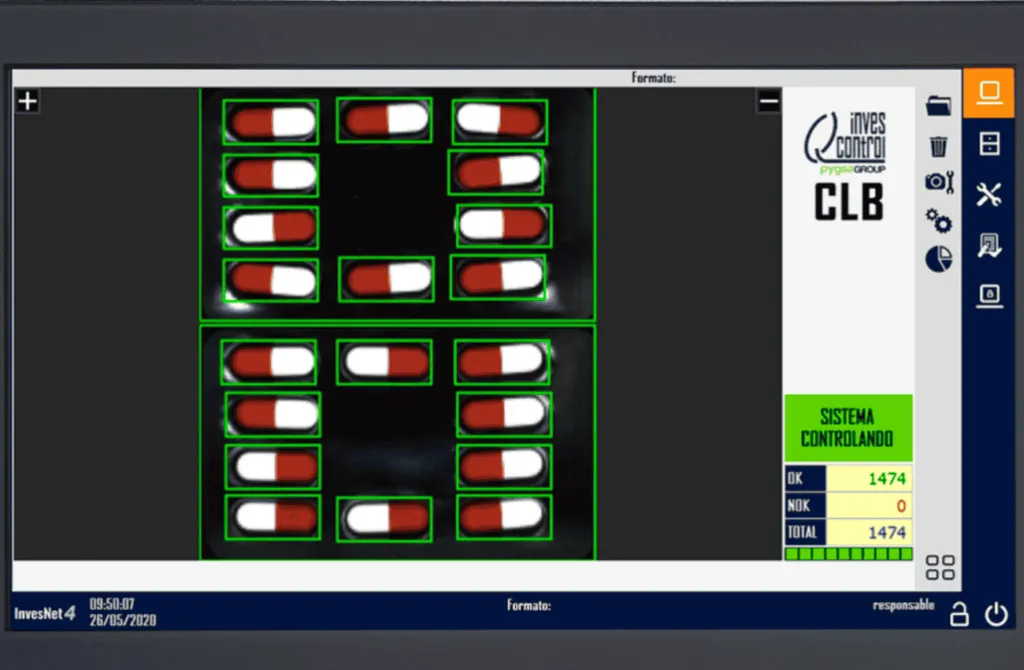
- Controles
de calidad mediante robots: Esta
aplicación suele llevar un dispositivo de adquisición de imágenes en la mano
del robot, ya sea 2D y 3D, para poder acceder a diferentes zonas del objeto a
inspeccionar o poder escanearlo haciendo un barrido de este, obteniendo una
representación 3d de la pieza gracias a la composición de las diferentes
adquisiciones.
- Detección
de obstáculos: A parte de la
manipulación de piezas, la visión es muy útil en agvs y drones para poder
evitar colisión con obstáculos. Serian el sustitutivo a sensores con la
particularidad que pueden ser potenciados por inteligencia artificial para
entender que objetos se presentan en su camino.
Actualmente se están desarrollando
nuevas herramientas de Deep Learning para ayudar a los robots a comprender
mejor el mundo que les rodea y poder así hacer tareas cada vez más autónomas. Las
siguientes son algunas destacables de las muchas que hay en marcha:
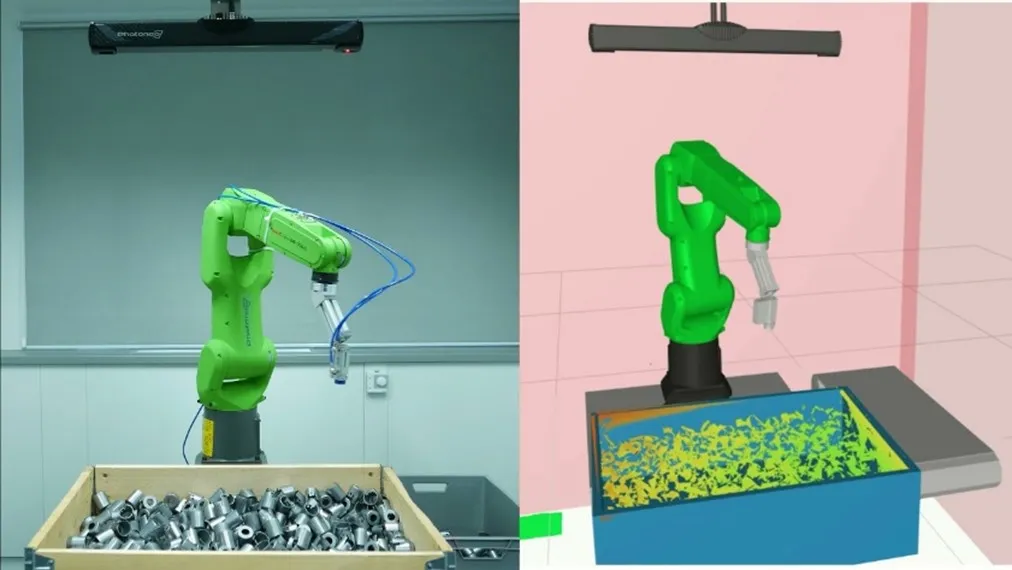
- Gemelos
digitales: Los gemelos digitales
llevan tiempo utilizándose para la simulación robótica industrial, sobre todo
para hacer estudios de viabilidad de proyectos y conocer tiempos de ciclo,
cargas, longitud suficiente para llegar a todos los puntos, entre otros. Pero gracias
a los nuevos avances en inteligencia artificial, se pueden utilizar estas
simulaciones para poder entrenar modelos de inteligencia artificial como se
hace por ejemplo en conducción autónoma, donde se generan datasets auto
anotados, quitando mucha faena manual para los modelos supervisados, y
situaciones incluso difíciles de crear en la vida real pero que podrían pasar,
por ejemplo, un avión aterrizando en la autopista es poco probable pero no
imposible. Se ha demostrado que entrenando una maquina en un simulador y
agregándole luego muestras reales para tunear el sistema, la eficiencia es muy
alta. Esto abre una nueva vía en poder facilitar el entrenamiento y la
implementación en instalaciones robóticas industriales de todo tipo, desde
brazos robóticos a vehículos guiados.
- Datos
sintéticos: Otro de los campos
donde se está trabajando dentro del Deep Learning es la generación de imágenes
sintéticas de forma automática. Gracias a los avances en redes generativas
adversarias (GANS) o los modelos de difusión, es posible entrenar una red para
crear datos digitales que nos sirvan para poder generar un dataset largo,
preciso y pre anotado.
- Segmentación
3D: Es una tarea que se esta
empezando a introducir en algunos sistemas de bin picking para poder obtener
ventaja del uso del Deep Learning en 3D y tendrá muchos casos de uso dentro de
la robótica industrial, ya que permite clasificar todos los puntos de una nube
de puntos a la clase o objeto que pertenecen, de manera que no será necesario
el uso de cad o un patrón entrenado para poder buscar objetos en la escena 3D.
Actualmente se esta trabajando mucho en poder mejorar la precisión de detección
sobre todo para poder separar bien los objetos entre sí.
- Guiado de montaje: En robótica industrial, se trata de que que los robots aprendan de la observación del montaje. Es decir, un operario le enseña al robot como montar una pieza y gracias al sistema de vision y la inteligencia artificial, una vez el operario a acabado el robot es capaz de imitar y reproducir el mismo montaje sin necesidad de ser programado para ello.
- Tracking: La idea es que los robots puedan asistir a los
operarios de forma autónoma, siguiéndolos en su tarea rutinaria de manera que
estos puedan acceder rápidamente a coger una herramienta, por ejemplo, en el
caso de un operario de mantenimiento, colocar frutas en una caja, entre muchos
otros casos de uso.
- Texto a imagen para entrenar robots: Partiendo de los últimos avances en generación de imágenes a partir de texto gracias a los modelos de difusión, la idea es poder darle un texto al robot con instrucciones de una acción para que se haga una idea visual de que debe hacer, que es algo muy innato y natural en los humanos. De esta manera el robot podría ordenar algo, ir a un sitio, colocar objetos de manera autónoma, entre muchos otros.
Conclusión
En este articulo nos hemos centrado en inteligencia y visión artificial en la robótica industrial y solo hemos nombrado alguno de los muchísimos casos de uso, estudios y avances que se están produciendo a una velocidad de vértigo. Fuera de la industria y la robótica industrial hay muchos otros casos y a pesar de que aun estamos a años luz de la AGI, que es la inteligencia artificial en la que un robot es igual o más listo que un ser humano, muchos procesos que actualmente se programan para que un robot los automatice serán aprendidos por estos de una forma completamente autónoma en los próximos años. De hecho, el ultimo robot de Google es un asistente para ayudar al ser humanos en ciertas tareas del hogar, ¿os imagináis que al acabar de comer no tenéis que recoger la mesa? ¿O que nunca más habrá que limpiar el polvo de las estanterías o arreglar el jardín? Parece mentira, pero como hemos vivido estos últimos años donde muchas cosas que no podíamos imaginar se han convertido en algo cotidiano, podemos decir que quizás la ficción en temas tecnológicos no este tan lejos de la realidad como pensamos.
Escrito por Sergio Redondo Cabanillas, R&D Manager en Grupo Bcnvision.
¿Quieres seguir leyendo blogs sobre visión artificial? haz clic aquí
Bibliografía
- ¿Qué es un
robot industrial? Definición y características https://robotnik.eu/es/que-es-un-robot-industrial-definicion-y-caracteristicas/
- Artificial Intelligence and
Robotics in the Manufacturing Industry https://www.ennomotive.com/artificial-intelligence-robotics/
- Artificial intelligence-based technology in industrial robots https://www.openaccessgovernment.org/artificial-intelligence-based-technology-industrial-robots/131495/
- The AI Impact for Next-Gen
Industrial Robots https://www.roboticstomorrow.com/story/2021/03/the-ai-impact-for-next-gen-industrial-robots/16400/
- Evolución de
la robótica industrial https://www.edsrobotics.com/blog/evolucion-robotica-industrial/
- Robots
industriales: tecnología y aplicaciones https://www.sicma21.com/robots-industriales-tecnologia-y-aplicaciones/
- ¿Qué es un
cobot? https://cadecobots.com/que-es-un-cobot/
- Cobot vs
industrial robot https://www.universal-robots.com/es/blog/diferencias-cobot-y-robot-industrial/
- AGV Robot:
características, tipologías y funciones https://www.grupoioe.es/agv-robot/
- Drones
industriales https://www.atriainnovation.com/drones-industriales/
- 10 Evil Robots Bent on
Destroying Humanity https://science.howstuffworks.com/10-evil-robots.htm
- Esta IA
averigua tu sexo sólo con mirarte a los ojos https://www.muyinteresante.es/doctor-fision/articulo/esta-ia-averigua-tu-genero-solo-con-mirarte-a-los-ojos-741647647691
- Habilidades
humanas que no pueden suplir las máquinas https://blogcandidatos.springspain.com/transformacion-digital/habilidades-humanas-que-no-pueden-suplir-las-maquinas/
- Dalle-bot paper https://arxiv.org/pdf/2210.02438.pdf
- Google robot https://www.youtube.com/watch?v=Jy3zjXK4ao4
- Google most advanced robot https://www.youtube.com/watch?v=dCPHGwW9SOk
- Dalle2 robot https://www.youtube.com/watch?v=_c5rcYwPTQg