Ingenersun. Despaletizado de pneus universais
INGENERSUN é uma empresa de engenharia especializada na automação e robotização de processos industriais, localizada em Zamudio, Vizcaya.
Os projetos de automação turnkey da INGENERSUN oferecem soluções totalmente personalizadas para atender às necessidades dos clientes. A equipe multidisciplinar, com ampla experiência no setor, permite à INGENERSUN fornecer soluções próprias em todos os aspectos de um projeto.
A INGENERSUN gere os projetos do início ao fim, garantindo alta flexibilidade no design e resposta rápida para adaptar a solução às necessidades específicas de cada cliente.
Neste caso, apresentamos a solução universal de despaletização de pneus desenvolvida pela Ingenersun com um sistema de visão criado pela Bcnvision. O caso de sucesso concentra-se no bin picking de pneus com um robô antropomórfico e visão 3D.
Este despaletizador universal de pneus funciona em:
- Um track de 15 metros
- 6 baias de descarga
- Altura máxima da pilha de 1600 mm
- Multirreferência
- Identificação de códigos de barras por leitores
- Correção automática de trajetória para colunas desalinhadas
- Sinalização individual do estado das baias
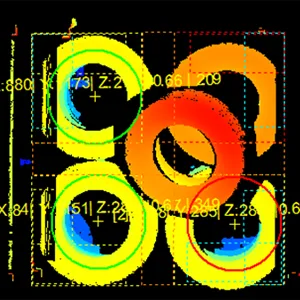
A solução de visão artificial baseia-se em tecnologia de aquisição 3D e inclui um dispositivo Photoneo, que gera uma nuvem de pontos através da projeção de padrões a laser e algoritmos de reconstrução desenvolvidos pela Bcnvision de acordo com os requisitos da Ingenersun.
Esta tecnologia gera uma nuvem de pontos precisa com um amplo campo de visão, permitindo sua implementação em uma grande variedade de situações.
Quando o robô está na posição nominal, o sistema de visão realiza a aquisição, resultando em uma nuvem de pontos processada para obter coordenadas (x, y, z).
Estas coordenadas são enviadas ao PLC, que as processa e gera uma estratégia de descarga otimizada, baseada em um algoritmo desenvolvido para realizar a captura sem colisão com o contentor ou garra. ##media##
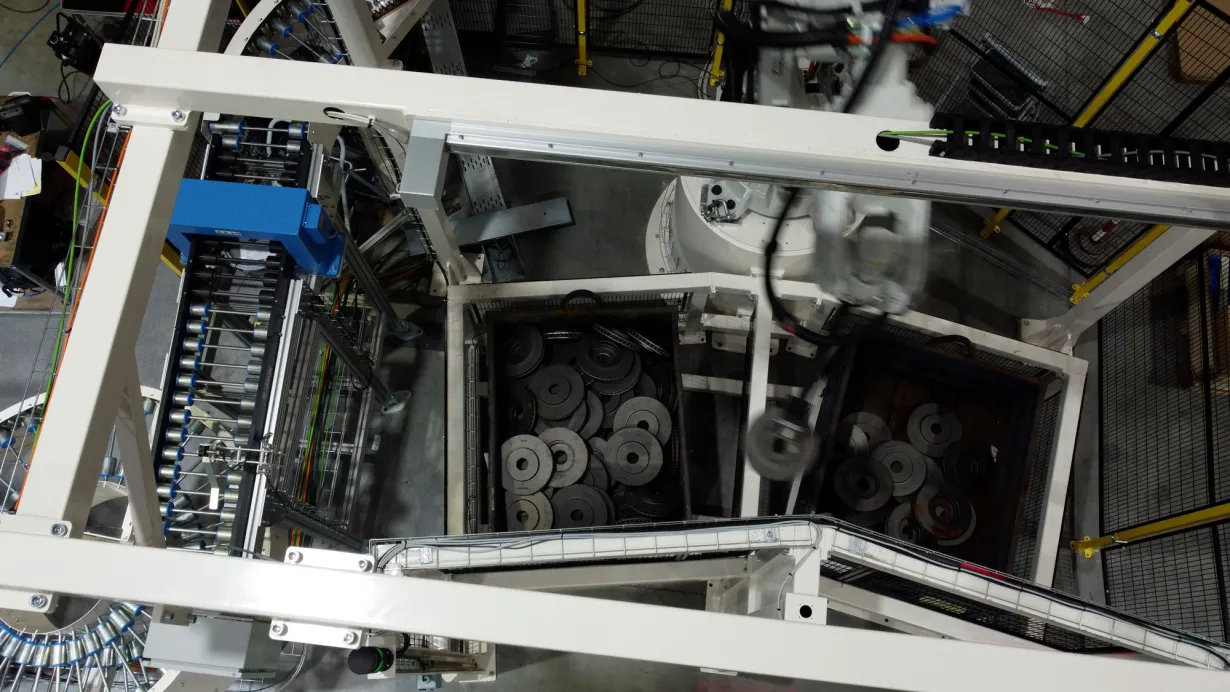
O robô, então, posiciona-se sobre o centro de cada coluna e realiza a descarga completa, incluindo um sistema de correção de trajetória para absorver variações na posição dos pneus ao longo da coluna. O robô está montado em um track que permite percorrer várias posições reservadas para o posicionamento dos contentores de pneus (chamadas baias) e realizar a descarga de forma contínua. Tanto o robô quanto o dispositivo de aquisição estão montados no track, oferecendo duas vantagens principais:
- Calibração única com um elemento localizado na plataforma, necessária apenas na primeira vez ou após alterações significativas de hardware.
- Otimização do ciclo processando o próximo contentor enquanto o atual é descarregado.
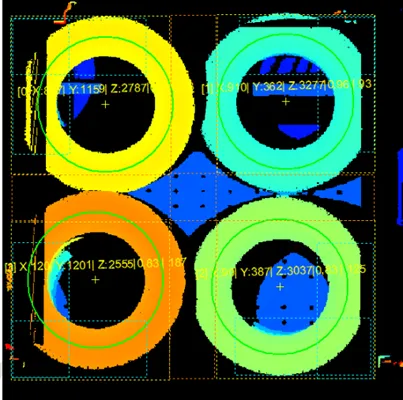
O sistema foi desenvolvido considerando duas possíveis distribuições nos contentores:
- Distribuição quadrada
- Distribuição triangular, considerando todas as possibilidades de orientação
Estas distribuições permitem a adição de detecção de anomalias que podem interferir nas trajetórias do robô durante a sequência de descarga.
As anomalias detectadas incluem:
- Pneus caídos em áreas críticas
- Colunas com pneus inclinados além do limite permitido
- Pneus sobrepostos
O sistema de detecção e aquisição de coordenadas é configurado para diferentes tipos de contentores, que podem variar os planos de referência. Diferentes algoritmos também são gerados com base no diâmetro interno de cada referência predefinida, garantindo alta precisão nos cálculos.
Além do despaletizador, há uma segunda estação dedicada a empilhar pneus automaticamente, multirreferência, sem ajustes manuais e com cadência regulável.
Abaixo, você pode assistir ao vídeo deste caso de sucesso, gentilmente fornecido pela Ingenersun.